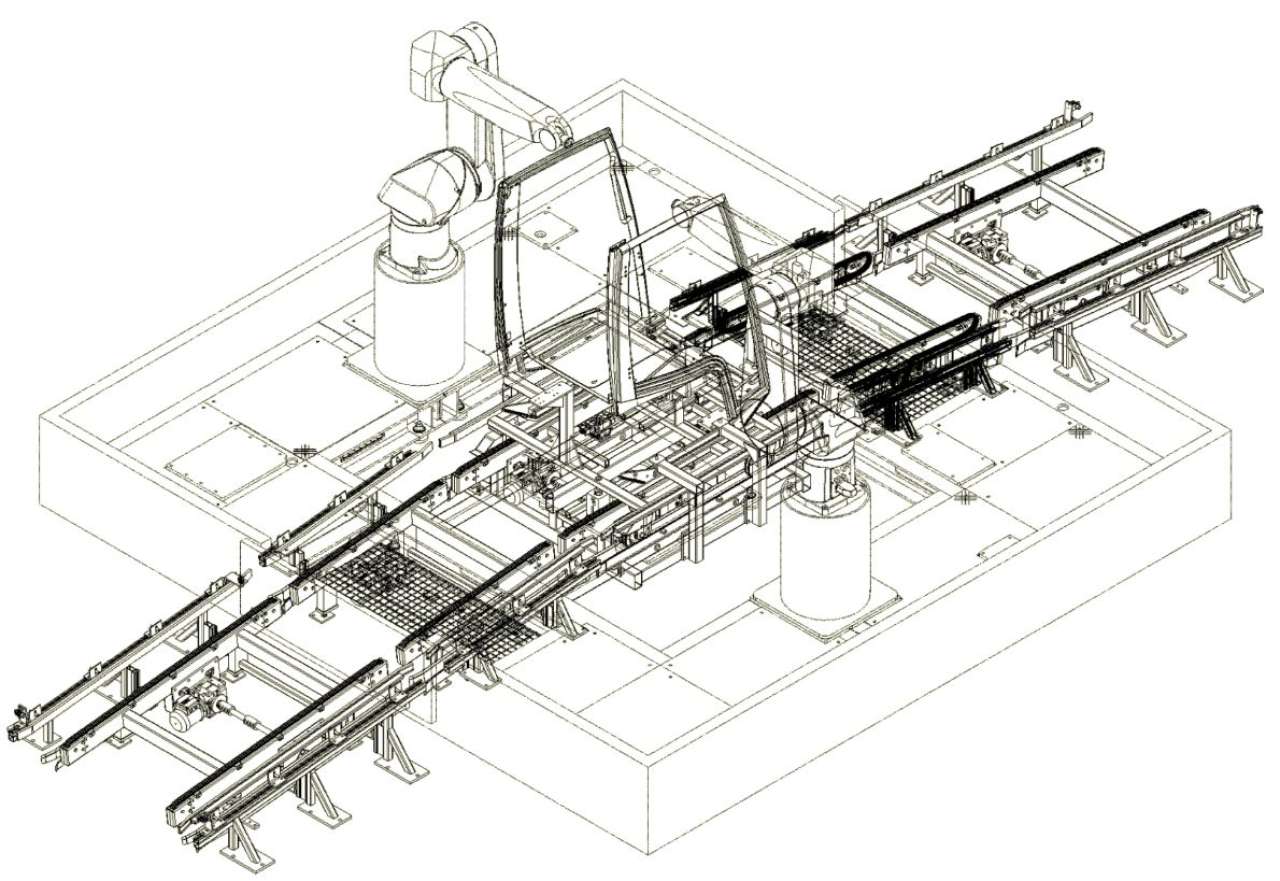
This conveyor technology is used to transport previously welded forklift cabs through a robot grinding cabin.
The racks with the forklift cabins firmly attached to them are pushed onto a slightly inclined 2-strand carrier chain conveyor. As soon as the rack comes into contact with the chain conveyor, the rack is picked up and automatically transported up the incline. The chain conveyor ends just before the on-site high-speed door. Another chain conveyor takes over the incoming rack.
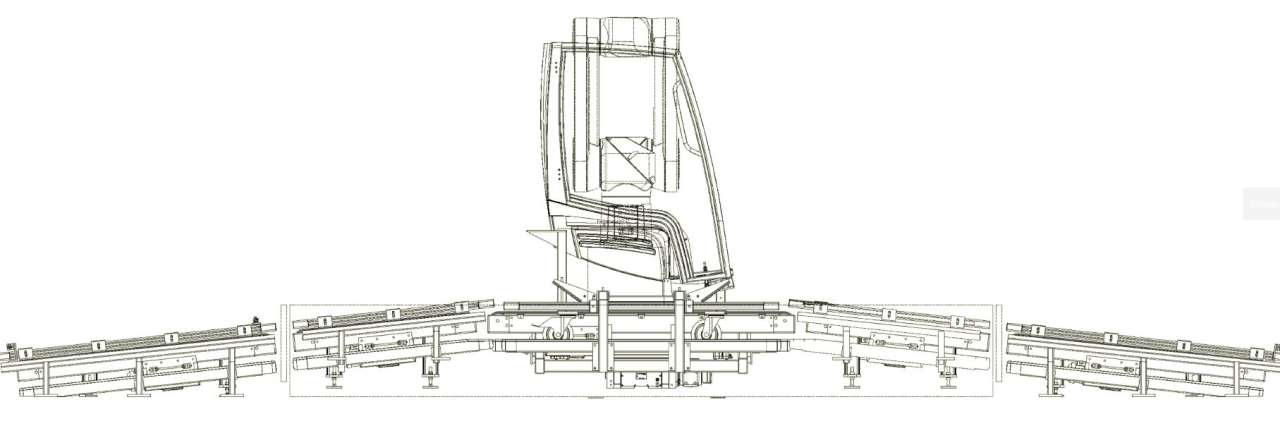
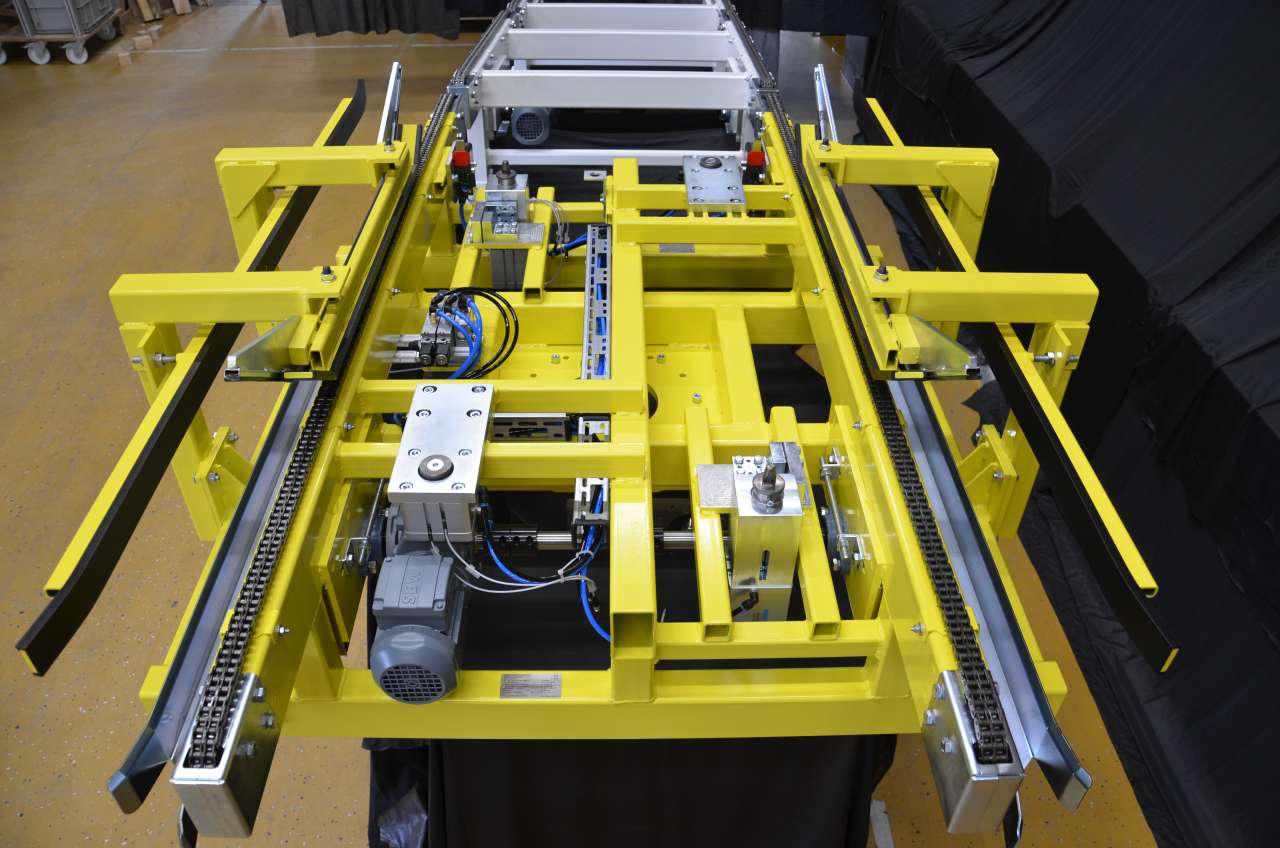
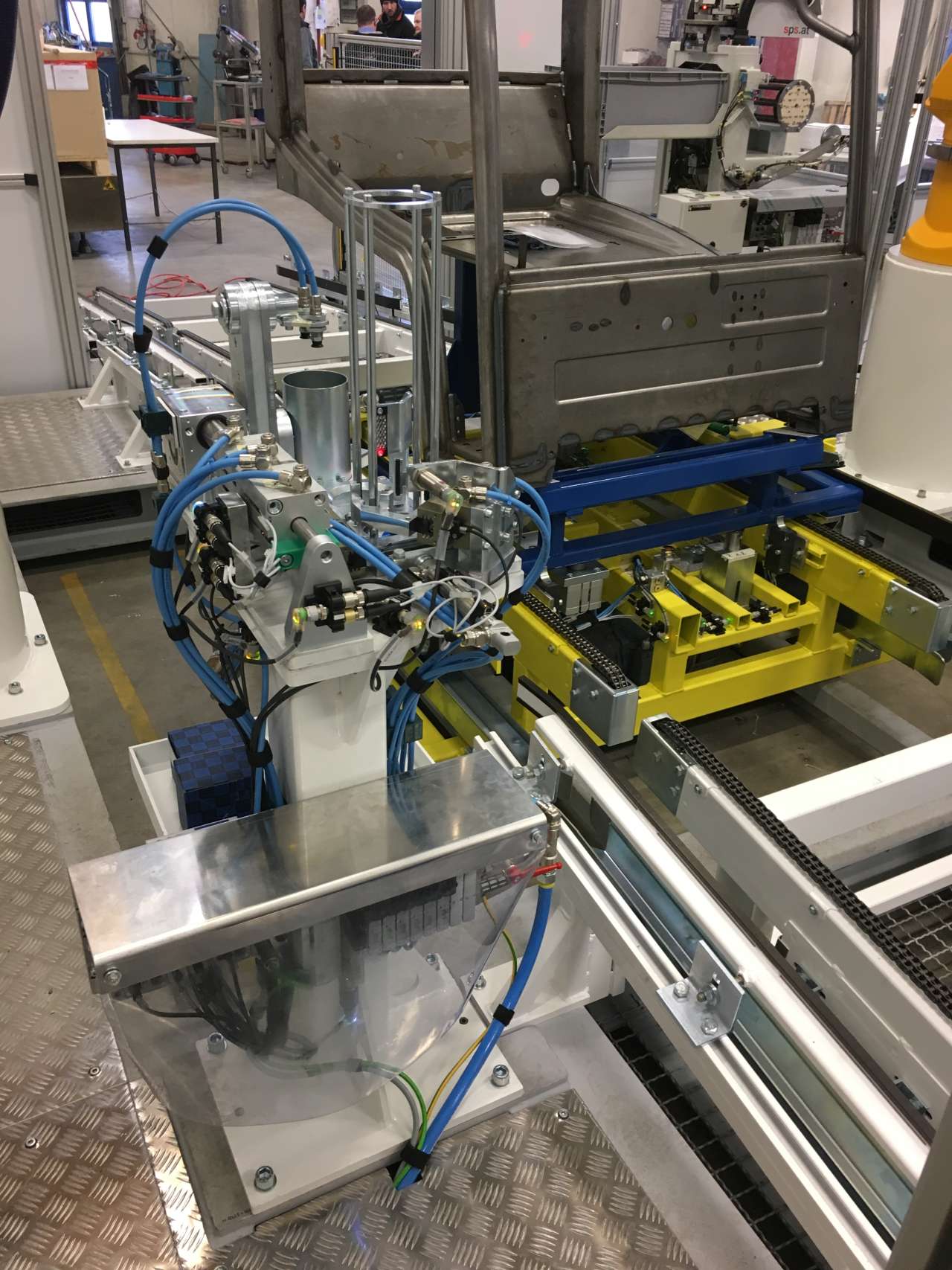
A turntable on which another 2-strand chain conveyor is located is positioned in the centre of the processing cell. The frame is stopped, indexed and clamped at this position. The robot then carries out the sanding process.
After processing by the robot, the carrier chain conveyor transports the rack through another high-speed gate to another carrier chain conveyor as a discharge point. This conveyor section has a slope at the end of which the racks can be removed again.
Components
Carrying chain conveyor with tensioning and indexing unit and rotary table in robot cell, hardware and software consisting of circuit diagram creation, control cabinet construction, system installation, software creation, system visualisation, commissioning and production support.