Sondergestelle (Stapler,- oder Kranbeladung möglich)
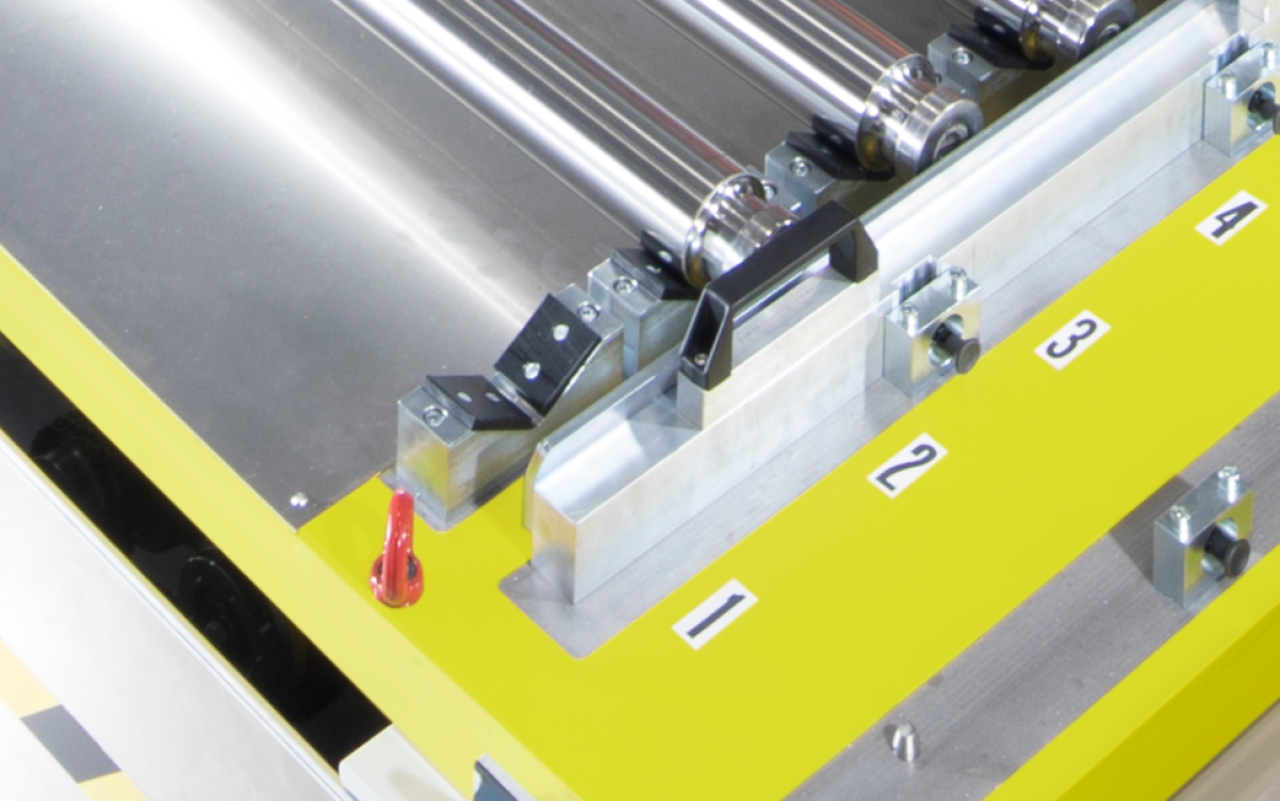
Auf den Gestellen befinden sich Werkstückträger mit Prismenaufnahmen für die eigentlichen Werkstücke
Maße der Rohre
SZ1 Ø 78 bis 108mm mit Länge 1.760mm
SZ2 Ø 78 bis 108mm mit Länge 1.532mm
Gewicht/Rohr
SZ1 max. 130kg, SZ2 max. 112kg
Förderrichtung
längs
Aufstellort
trockener Betrieb in geschlossenen Räumen
Umgebungstemperatur
15 °C – 40°C
Besondere Umgebungseinflüsse
keine
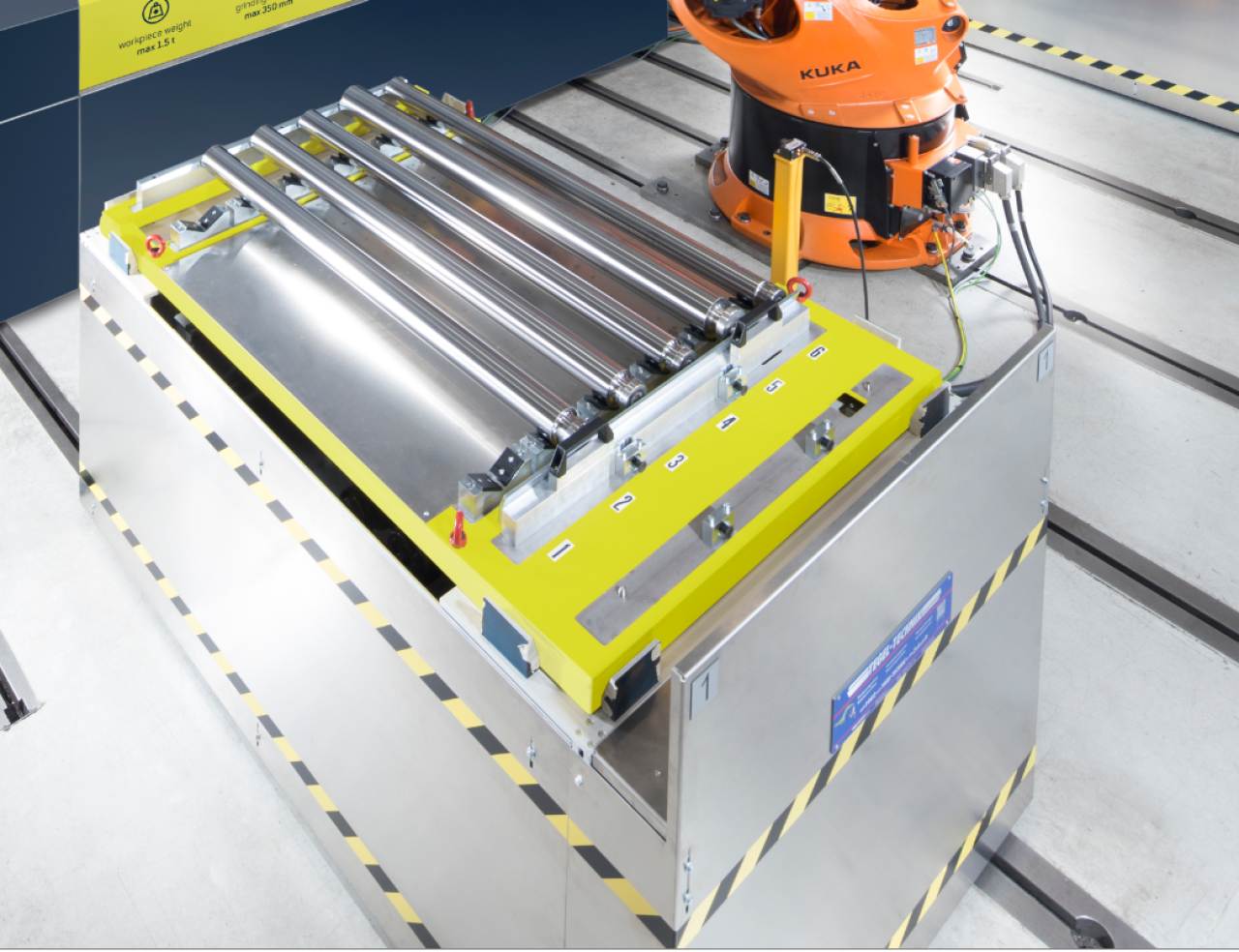
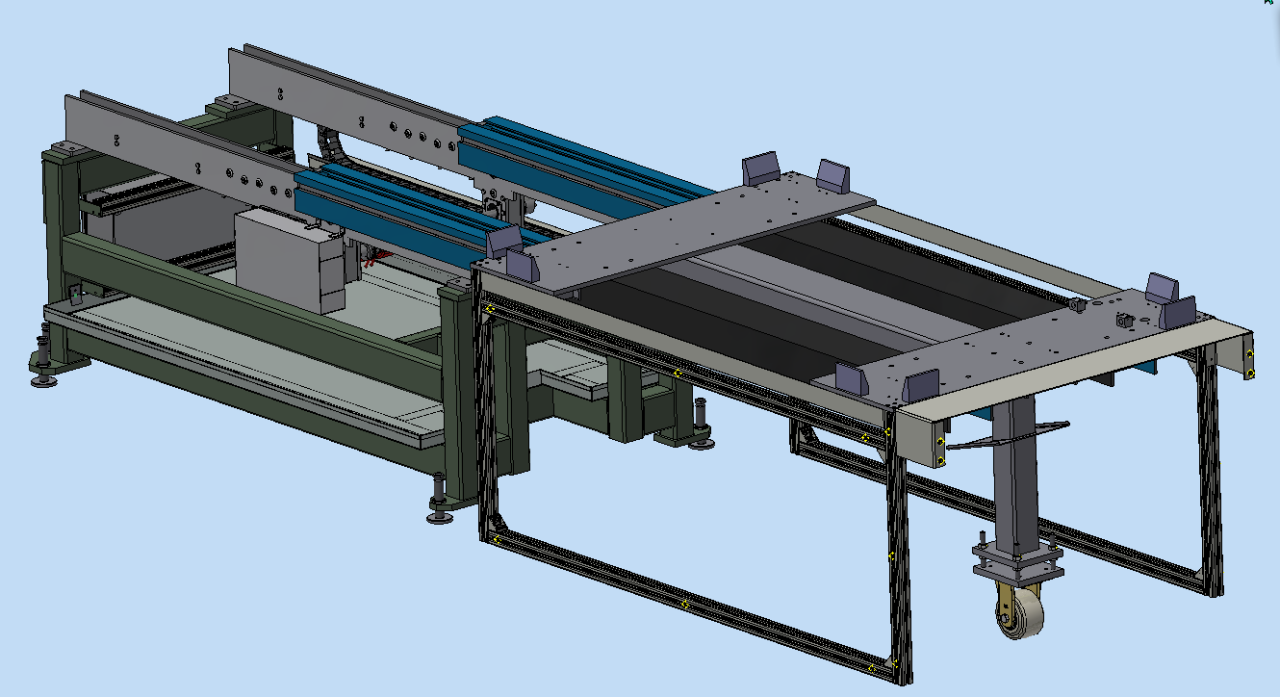
Automatisches Zuführen von Rundmaterialien über Teleskopschienensystem in Roboterzelle zur Schleifmaschine - Hier wurde eine Sonderkonstruktion angefertigt bestehend aus einem Grundrahmen, einer Teleskopgabel mit Stahlrahmen und Prismenaufnahmen.
Auf einem stabilen auf dem Boden verdübelten Grundrahmen aus Stahl ist die Teleskopgabel montiert. Auf dieser Teleskopgabel befindet sich ein stabiler Stahlrahmen mit Einweiserblechen mit dessen Hilfe der Bediener das ausgefahrene Teleskop beladen kann.
Zur Unterstützung des ausgefahrenen Teleskops fährt eine Stützrolle mit aus. Das Gewicht des Teleskopes ist auf 1,5 Tonnen ausgelegt und macht einen Weg von 2.350mm.
Der gelbe Stahlrahmen, wird über die vier roten Anhängeösen mit einen Hallenkran an die aus dem Schutzzaun herausgefahrenen Teleskopaufnahme eingelegt und anschließend wieder zurück in den Bedienbereich des Roboters zurückgefahren. Der Roboter entnimmt nacheinander die zu schleifenden Rundmaterialien und legt diese nach der Schleifbearbeitung wieder in dem gelben Stahlrahmen ab. Die Teleskopschiene fährt die bearbeitete Charge aus dem Schutzzaunbereich heraus und der Mitarbeiter entnimmt mit dem Hallenkran die fertige Charge und legt eine neue ein.
Komponenten
Sonderkonstruktion: Grundrahmen aus Stahl, Teleskopgabel, Prismenaufnahmen und Anlageninstallation.